在面试c++开发过程中,我经常问STL vector的内容,这里面挖掘的内容比较丰富,不限于:
- vector的内存配置器实现(经典内存池)
- vector扩容策略
- at和[]操作符的区别
- 迭代器失效问题
- 打码实现一个vector
内存配置器
在STL标准下,内存配置器(allocator)是有标准的
1
2
3
4
5
6
7
8
9
// 申请内存空间
pointer allocator::allocate(size_type n, const void* = 0)
// 释放内存空间
void allocator::deallocate(pointer p, size_type n)
// 调用对象构造函数,等同于 new((void*)p) T(x)
// new((void*)p) T(x) 为placement new,即在指定内存空间下构造函数
void allocator::construct(pointer p, const T& x)
// 调用对象析构函数,等同于 p->~T()
void allocator::destroy(pointer p)
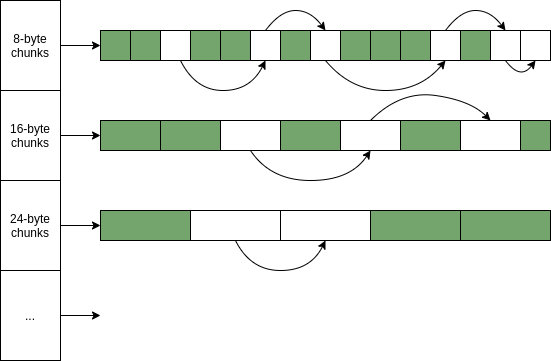
SGI实现的allocator至少有两级,
- 第二级配置器使用自由链表实现内存池,可以有效减小频繁的申请和释放以及内存碎片问题。
- 第一级配置器直接简单封装的malloc和free。
扩容策略和均摊分析
接下来考虑常见的插值场景(第二个问题),当vector扩容时,内存申请策略为什么一般是扩展1.5或者2倍?
1
2
3
4
5
6
7
8
9
10
vector<int> = v; // start with an empty vector
v.push_back(1); // v = [1] and capacity = 1
v.push_back(2); // v = [1,2] and capacity = 2
v.push_back(3); // v = [1,2,3] and capacity = 4
v.push_back(4); // v = [1,2,3,4] and capacity = 4
v.push_back(5); // v = [1,2,3,4,5] and capacity = 8
v.push_back(6); // v = [1,2,3,4,5,6] and capacity = 8
v.push_back(7); // v = [1,2,3,4,5,6,7] and capacity = 8
v.push_back(8); // v = [1,2,3,4,5,6,7,8] and capacity = 8
v.push_back(9); // v = [1,2,3,4,5,6,7,8,9] and capacity = 16
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
template<class T>
void vector<T>::push_back(const T& val) {
if (capac == 0)
reserve(1);
else if (sz==capac)
reserve(2*capac); // 2倍扩容
alloc.construct(&elem[sz], val);
++sz;
}
template<class T>
void vector<T>::reserve(int newalloc) {
if(newalloc <= capac)
return;
T* p = alloc.allocate(newalloc);
for(int i=0; i<sz; ++i)
alloc.construct(&p[i],elem[i]); // copy
// deallocation omitted ...
elem = p;
capac = newalloc;
}
我们可以统计元素的插入和复制的操作,计算一下每次插入的代价:
| operation | capacity | cost(copy+insert) |
|---|---|---|
| push_back(1) | 1 | 1 |
| push_back(2) | 2 | 1 + 1 |
| push_back(3) | 4 | 2 + 1 |
| push_back(4) | 4 | 1 |
| push_back(5) | 8 | 4 + 1 |
| push_back(6) | 8 | 1 |
| push_back(7) | 8 | 1 |
| push_back(8) | 8 | 1 |
| push_back(9) | 16 | 8 + 1 |
归纳一下,代价函数和总代价为:
\[C_i = \begin{cases} 1+2k &(if\ {(i−1)=2k}) \\ 1 &(otherwise) \\ \end {cases}\] \[T(n) = \sum_{i=1}^n{C_i} \le n+ \sum_{i=1}^{|\lg n|}{2^i} = n + 2n -1 = 3n - 1\]均摊一下,平均代价为
\[c = \frac {T(n)}{n} = (3n − 1)/n < 3.\]因此,每一个操作的均摊成本为3,换句话说,每一个push_back操作的平均成本为$O(1)$。
均摊分析(Amortized Analysis)几种常用的技术:
- 聚合分析,决定n个操作序列的耗费上界$T(n)$,然后计算平均耗费为 $T(n)/n$。
- 记账法,确定每个操作的耗费,结合它的直接执行时间及它在对运行时中未来操作的影响。通常来说,许多短操作增量累加成“债”,而通过减少长操作的次数来“偿还”。
- 势能法,类似记账方法,但通过预先储蓄“势能”而在需要的时候释放。
参考:
- https://zh.wikipedia.org/wiki/%E5%B9%B3%E6%91%8A%E5%88%86%E6%9E%90
- https://johnysswlab.com/the-price-of-dynamic-memory-allocation/